昆虫規範衝突回避モデル
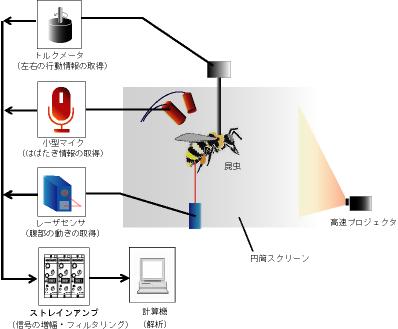
昆虫の複眼による情報処理と行動発現は,高速,シンプルかつ頑強であり, 工学的な応用が期待される. 本研究では,マルハナバチを用いた行動解析を行っている. トルクメータに固定したハチに対し,物体が接近する様子を模した視覚刺激を与え,それに対する衝突回避行動,旋回運動と羽ばたき運動の変化を計測する. 実験結果から行動モデルを提案し,実際の移動ロボットを用いた検証を行っている.