昆虫脳操縦型ロボットの構築
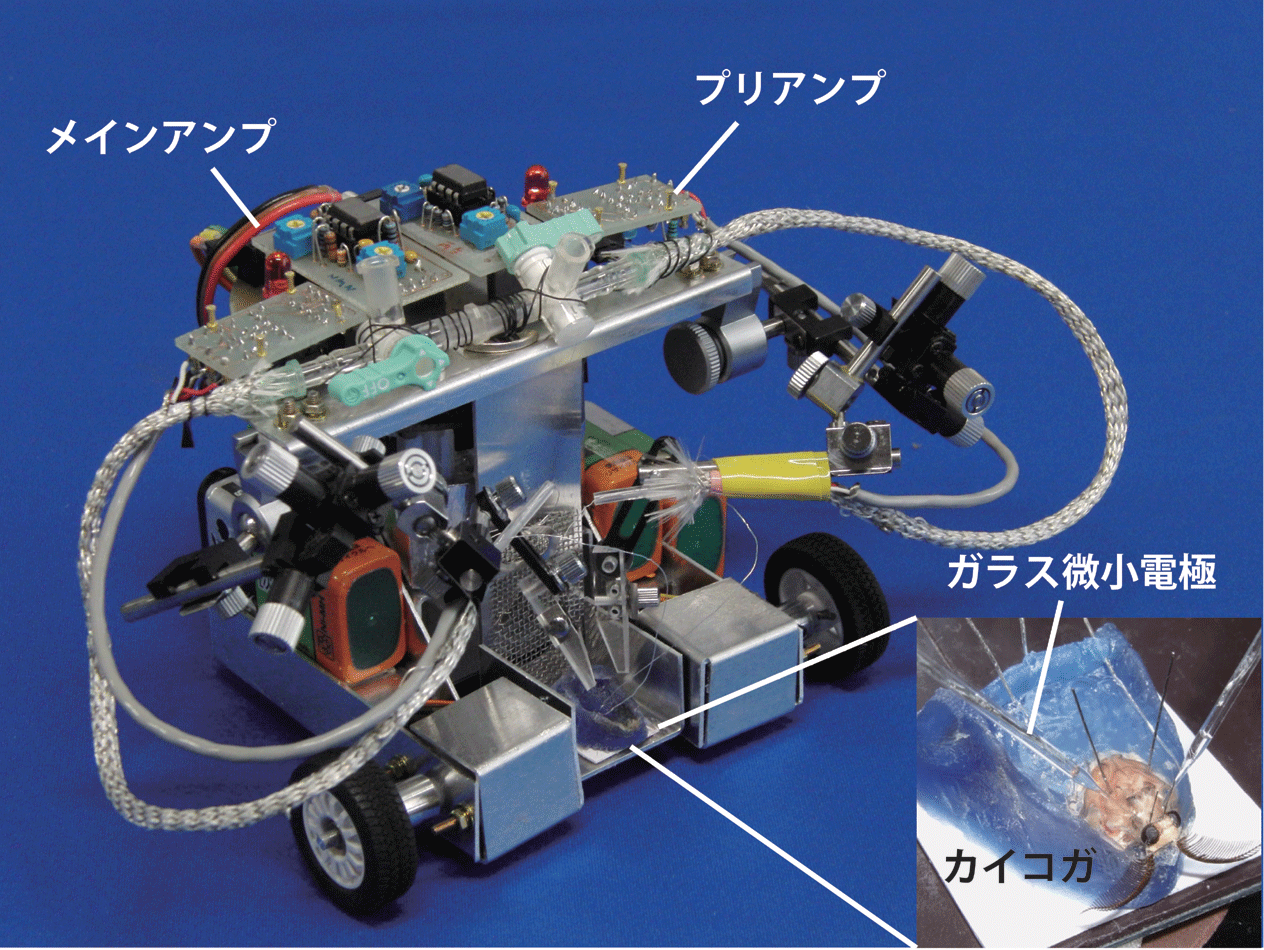
適応行動をとる昆虫の脳内部の情報処理機能を理解するために,昆虫脳操縦型ロボットを構築した.
脳をロボットのコントローラとしたこのシステムを用いることにより,環境中で適応行動をとるときの脳の機能を評価することが出来る.
生物学的な知見から構築された脳モデルを,このロボットのコントローラとすることも可能なので,実際の脳とモデルの機能比較も行うことが出来る.
この脳操縦型ロボットは,カイコガの脳からの行動指令信号により,カイコガの行動パターンを発現しながら目的地へたどり着くことが出来た.