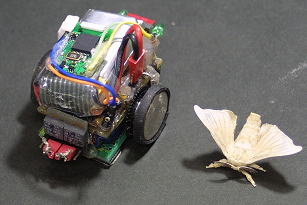
昆虫模倣の匂い源探索ロボット
成虫のカイコガのオスはメスの出すフェロモンを数km先からでも感知し,そのフェロモン源を探し出す行動を取る.
直進性のある光や音が直接飛び込んでくる視覚や聴覚を使った位置の特定の場合と異なり,フェロモンなどの風にのって拡散していく匂い粒子を媒介とする嗅覚を用いた位置の特定では,風向きや匂いの強さと言った情報から間接的に類推していかなくてはならない.
成虫のカイコガは餌をとらないため,限られたエネルギーを有効に利用したアルゴリズムでこうした匂い源探索を行なっている.
ロボットに匂いを検知するセンサーを取り付け,カイコガと同様の匂い探索行動を行なわせることによりそのアルゴリズムを検証する.
またカイコガのような匂い源探索行動を実装したロボットが出来れば,様々な産業で応用可能である.
参考
勝又聡一郎,安藤規泰,神﨑亮平,"昆虫匂い源探索アルゴリズム評価のための小型大気イオン源探索ロボット",第26回ロボット学会学術講演予稿集,
2008.