これまでに製作したロボットカーは次の通りです。
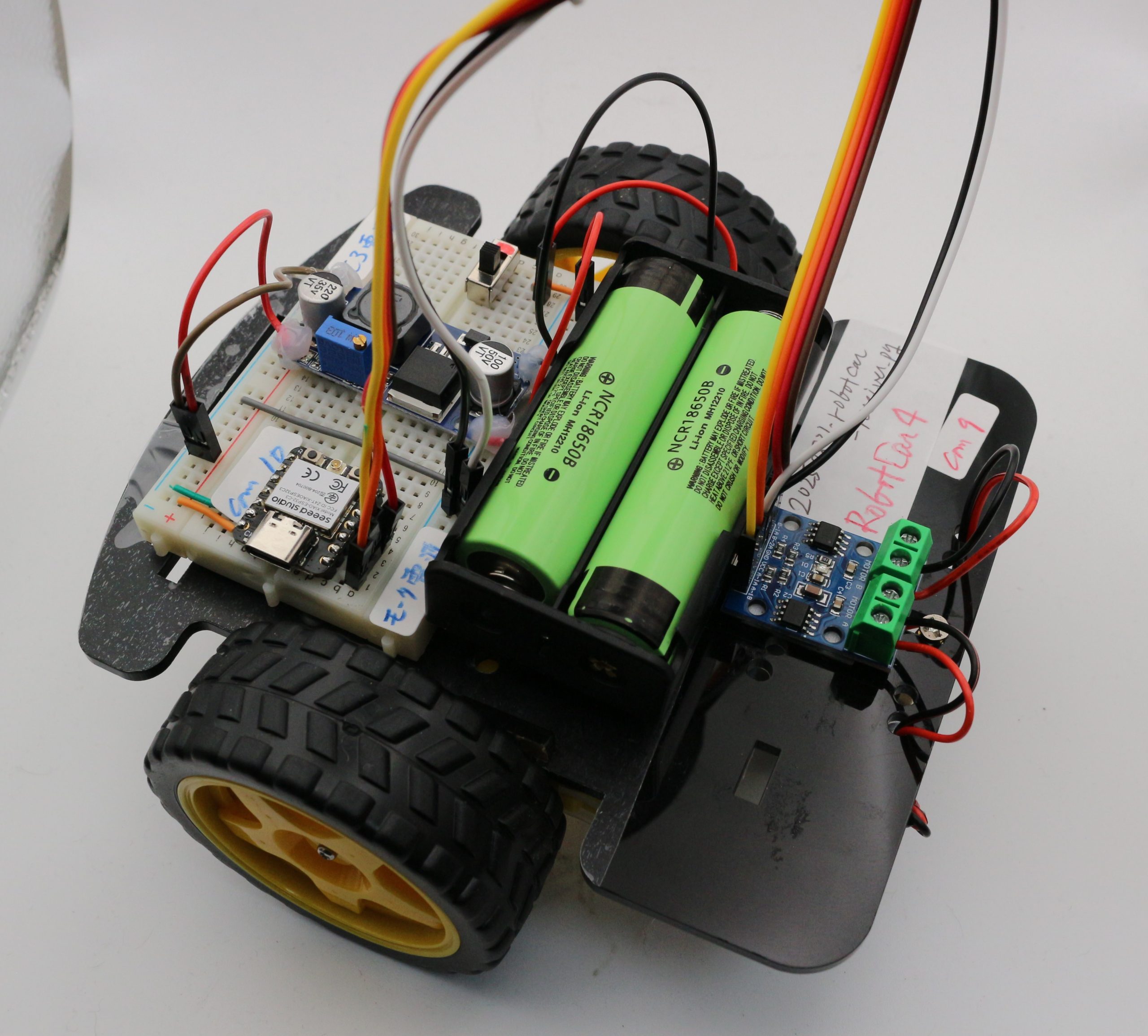
RobotCar4
RobotCar2のコントロールをESP32からXIAO ESP32C3に変更したもの。
ESPNowで通信
ジョイスティックで左右前後にコントロールできる。
筋電位は2チャンネル計測なため、前進と回転をコントロールできるように設定している。コントローラーの内部。XIAO ESP32C3、DC-DCレギュレータ、18650リチュウムイオンバッテリ、ジョイスティックがみえる。チョロQも前後の動きをコントロールできる。チョロQのリモコン部もみえる。
コード: 20250831-robotcar-receiver.py
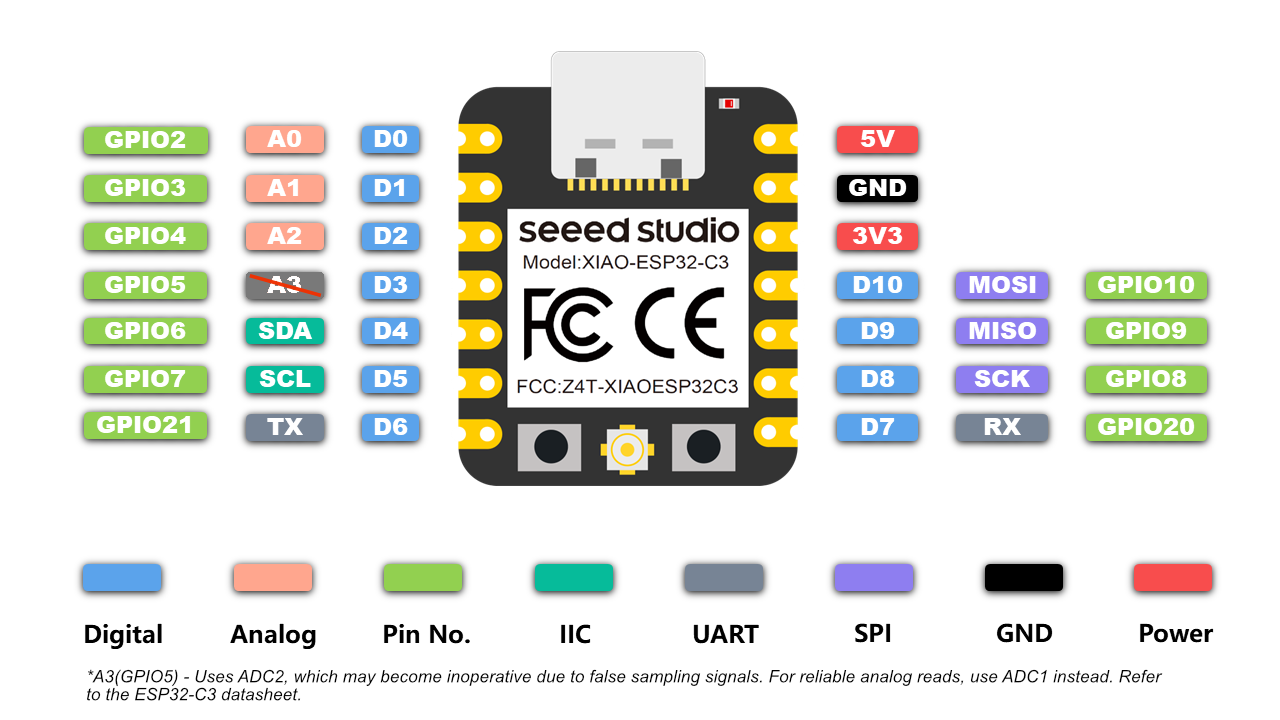
XIAO ESP32C3ピン配置図
電源図
ESP32-WROOM と XIAO ESP32C3 の比較表およびモータードライバについて
18650リチュウムイオンバッテリ
L9110モータードライバーモジュール
{kind=link}
{kind=link}
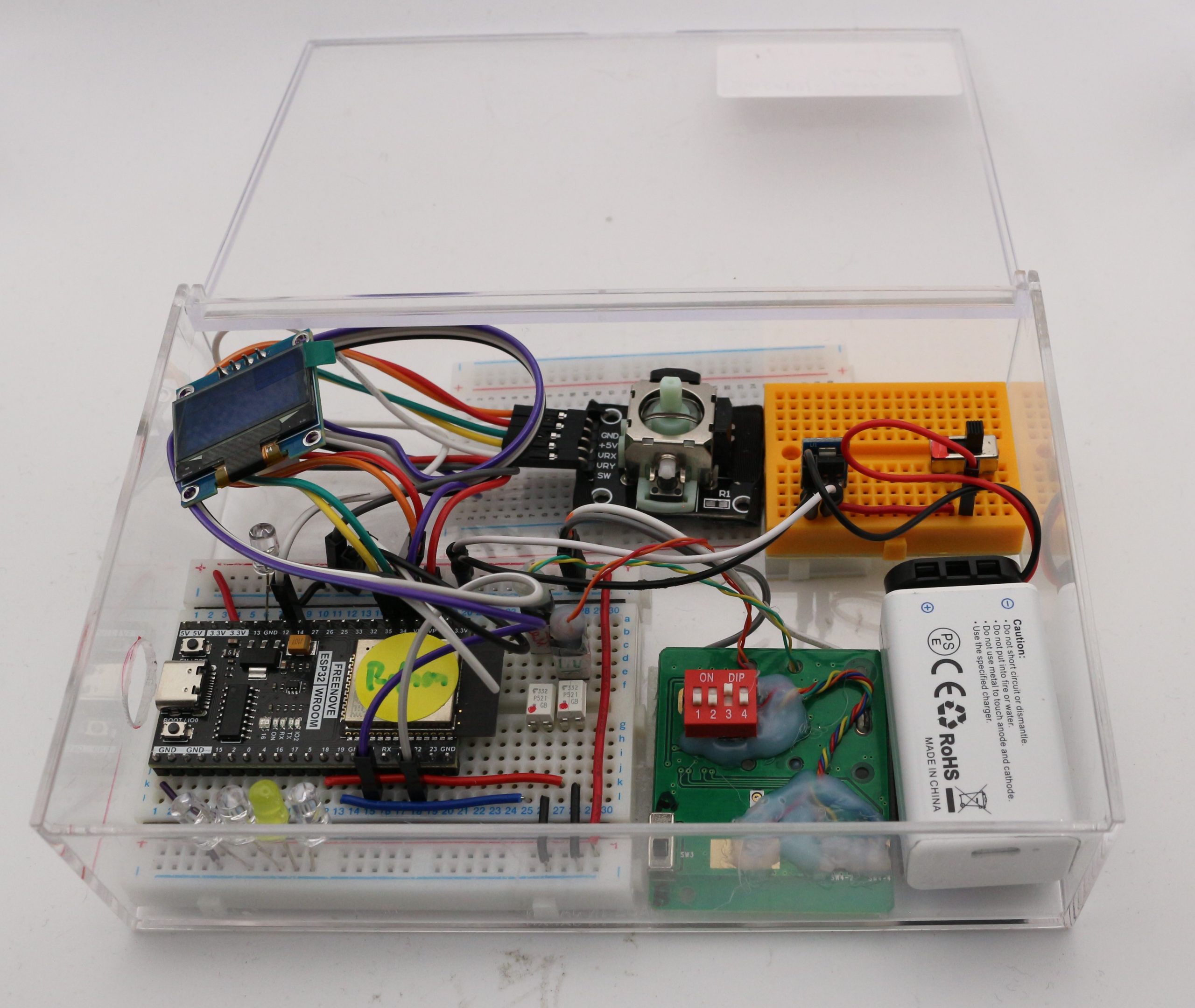
RobotCar4-コントローラー
ESPNowで通信
ジョイスティックで左右前後にコントロールできる。
筋電位は2チャンネル計測なため、前進と回転をコントロールできるように設定している。コントローラーの内部。ESP32、DC-DCレギュレータ、9Vバッテリ、ジョイスティックがみえる。チョロQも前後の動きをコントロールできる。チョロQのリモコン部もみえる。
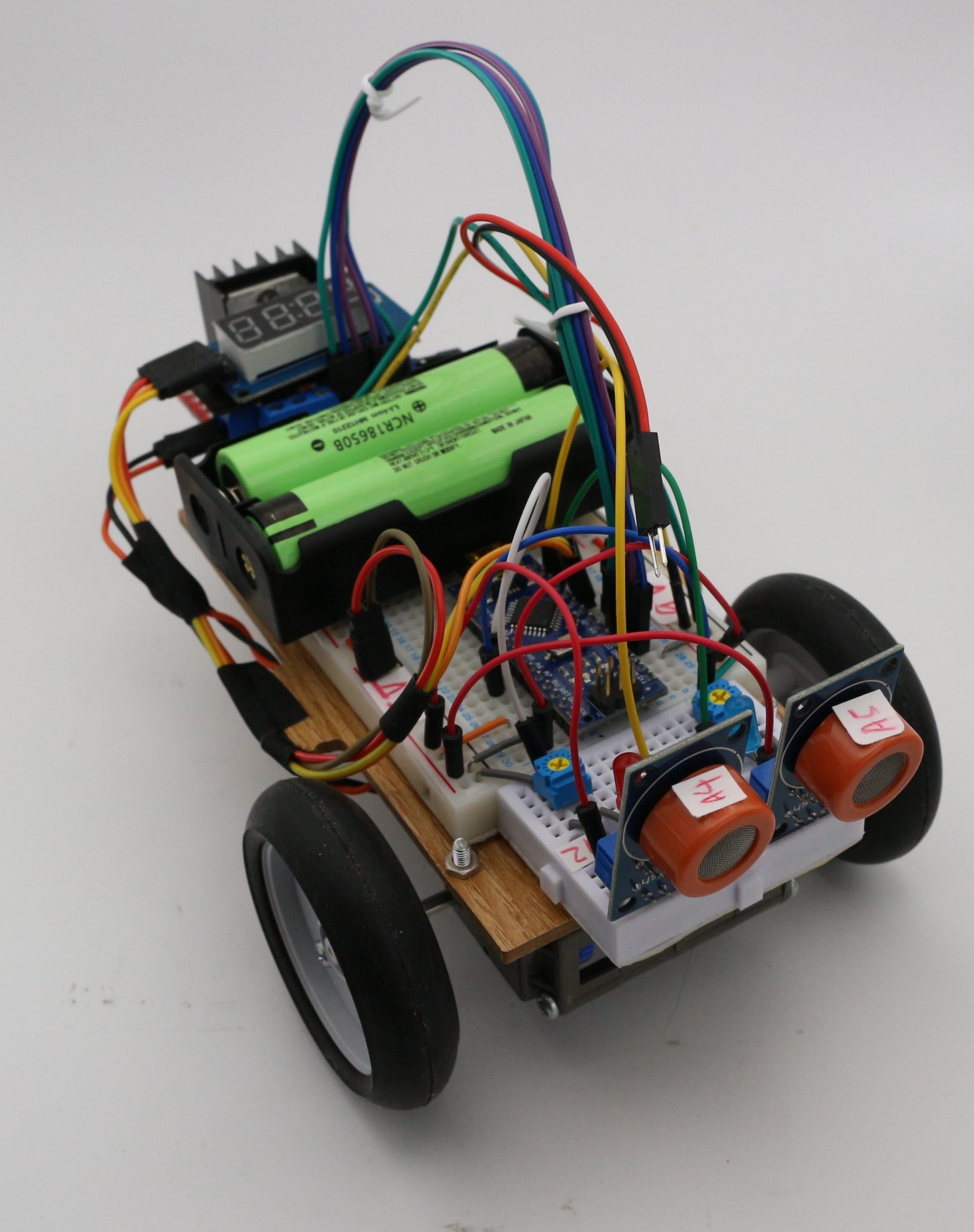
匂い(アルコール)探索ロボットカー
Eアルコールセンサーは、ロボットの先端の左右に2つ設置しました。Arduino nanoで制御しています。センサが反応するとLEDが点灯します。左右のセンサの値は、4桁の7-segmentディスプレイで表示されます。左の2桁で左のセンサの値、右2桁で右センサの値が表示されます。ある値(ここでは40)を超えると、Arduino nanoから、ロボットカーのモーターが駆動され動きます。左右のセンサの感度の調整は各センサの後ろにある半固定抵抗で行います。
コード:PictoBlox Code
解説:動画1 動画2
詳細:https://www.brain.rcast.u-tokyo.ac.jp/aad/alcohol-robot_car/
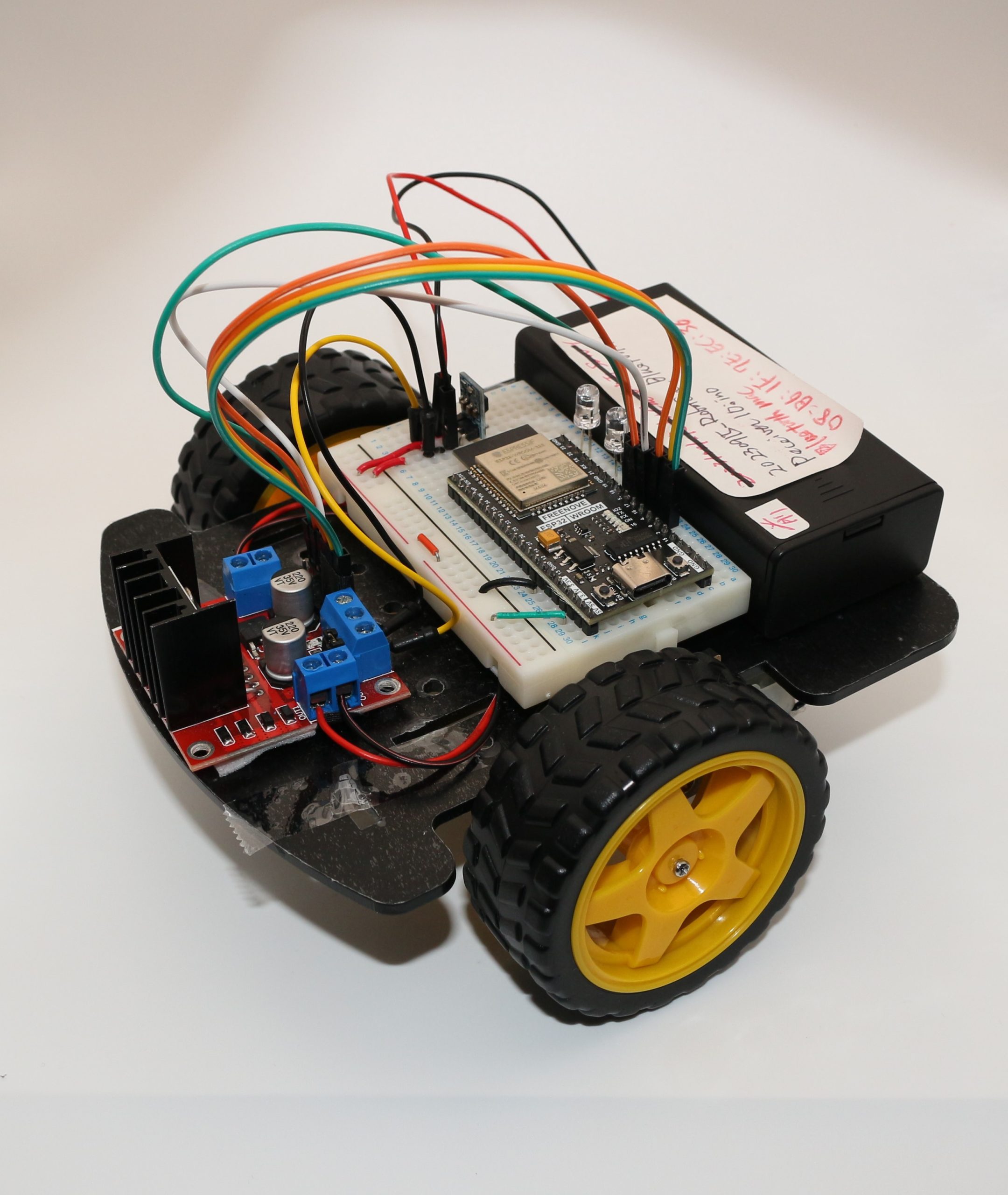
RobotCar3
WiFiやBluetooth、ESPNowなどでロボットカーをコントロールする学習用に、組み立てることも考えて製作した。Python, C++, Scratchでプログラミングできる。

RobotCar3-コントローラー
Bluetooth、WiFi、ESPNowなどの通信手段を自由にテストしながら学習できるように開発した。
ジョイスティックで左右前後にコントロールできる。
筋電位は2チャンネル計測なため、前進と回転をコントロールできるように設定している。コントローラーの内部。ESP32、DC-DCレギュレータ、9Vバッテリ、ジョイスティックがみえる。チョロQも前後の動きをコントロールできる。チョロQのリモコン部もみえる。
コード (ESP32 python) new version: 20250831-robotcar-sender.py
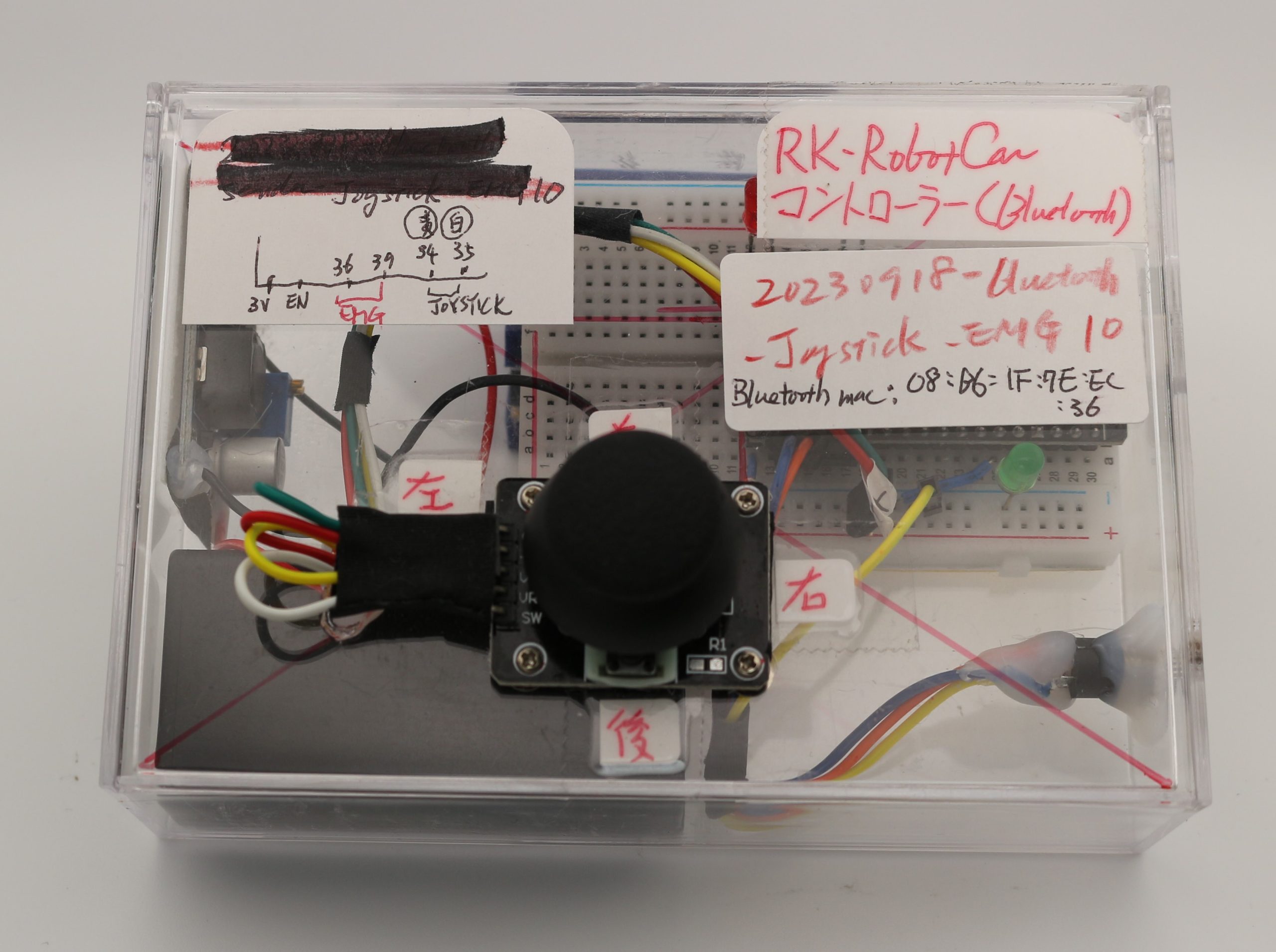
RobotCar2-Bluetooth-コントローラー
Bluetoothでコントロールできるように設定した。
ジョイスティックで左右前後にコントロールできる。
筋電位は2チャンネル計測なため、前進と回転をコントロールできるように設定している。チョロQも前後の動きをコントロールできる。
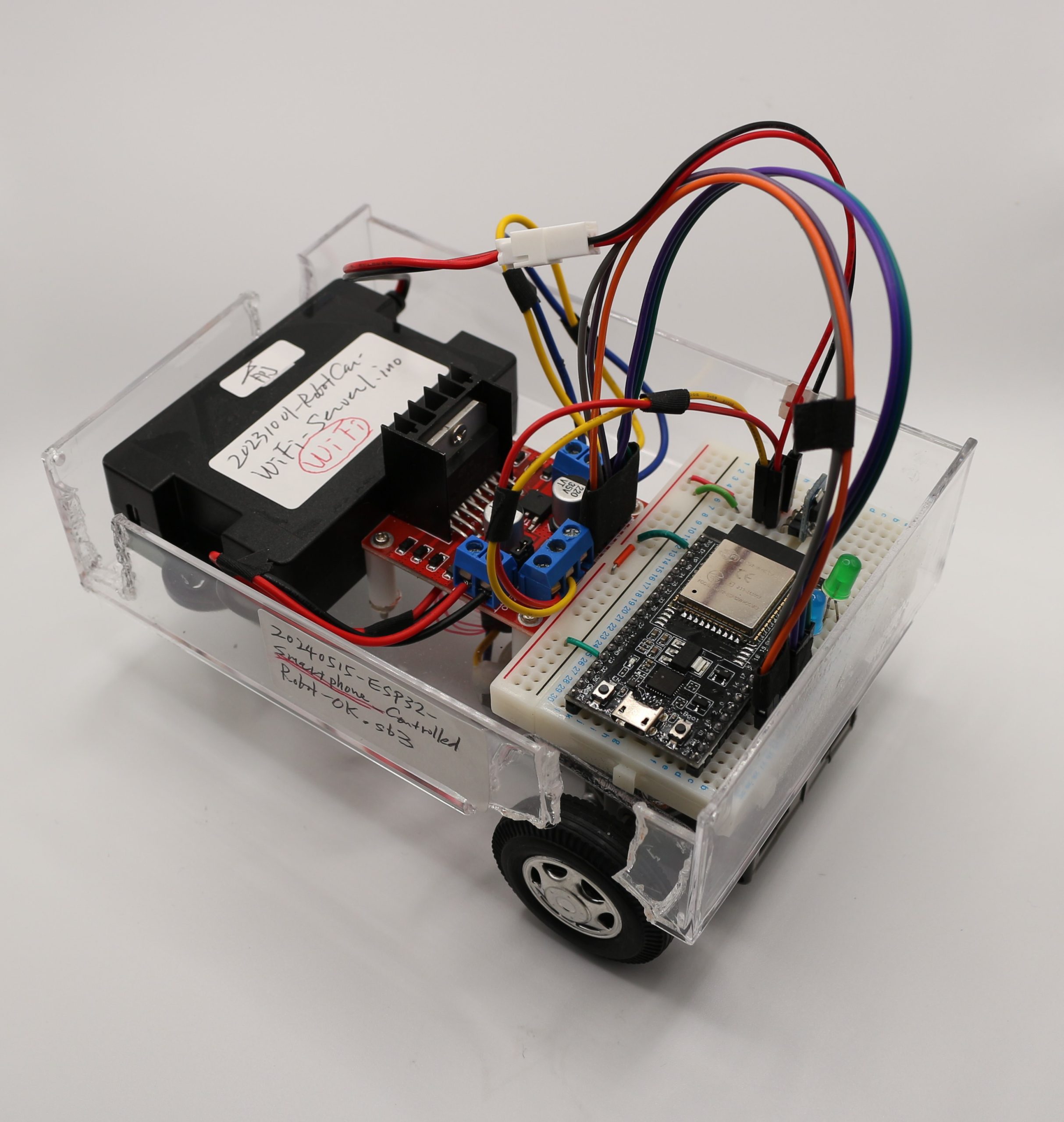

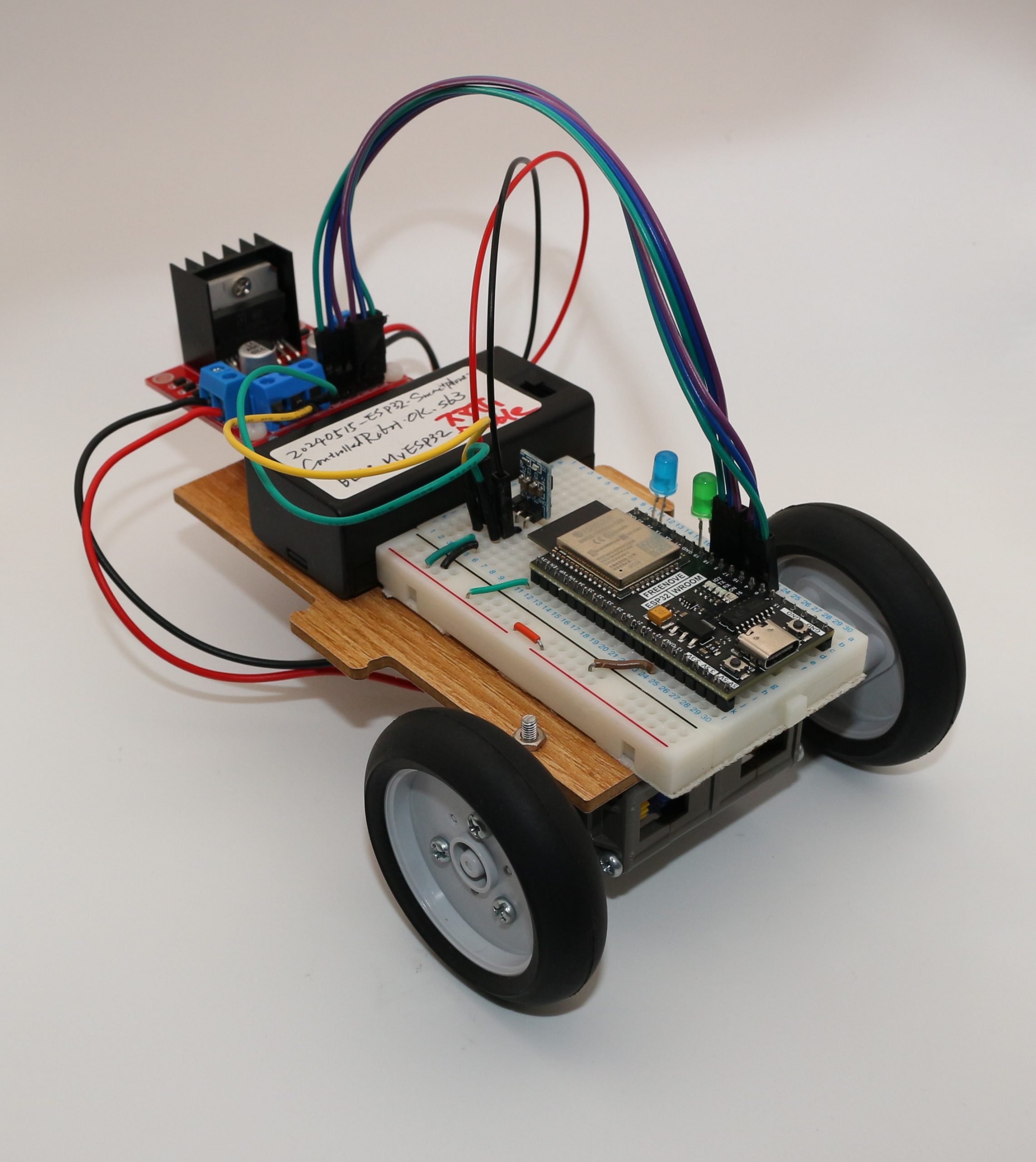
RobotCar1-WiFi-コントローラー
WiFiでコントロールするロボットカーのコントローラー。
ジョイスティックで左右前後にコントロールできる。
筋電位は2チャンネル計測なため、前進と回転をコントロールできるように設定している。チョロQも前後の動きをコントロールできる。

RobotCar1-WiFi-コントローラー
WiFiでコントロールするロボットカーのコントローラー。
ESP32のUSB端子と筋電位の入力端子がみえる。
コード (C++)
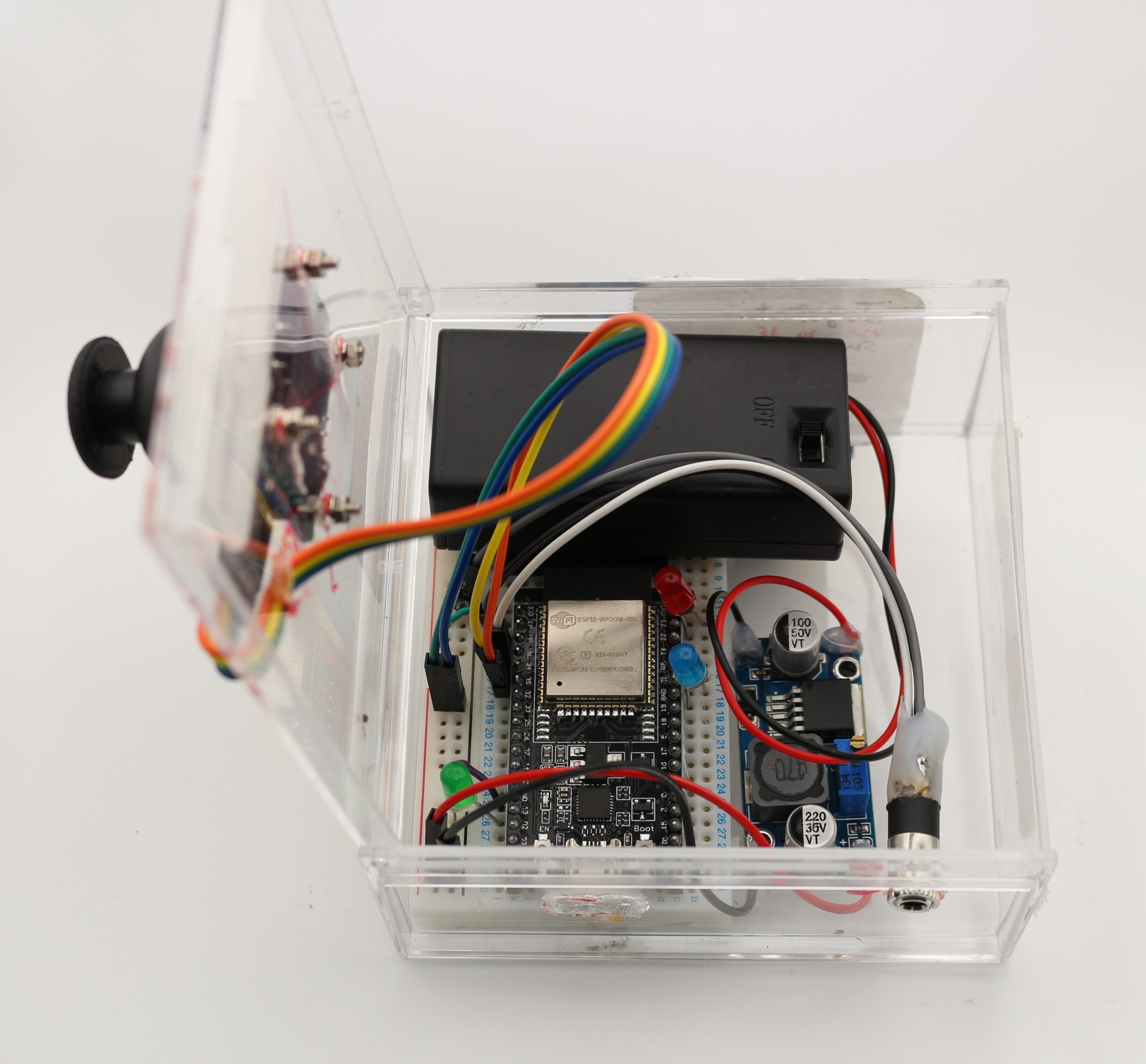
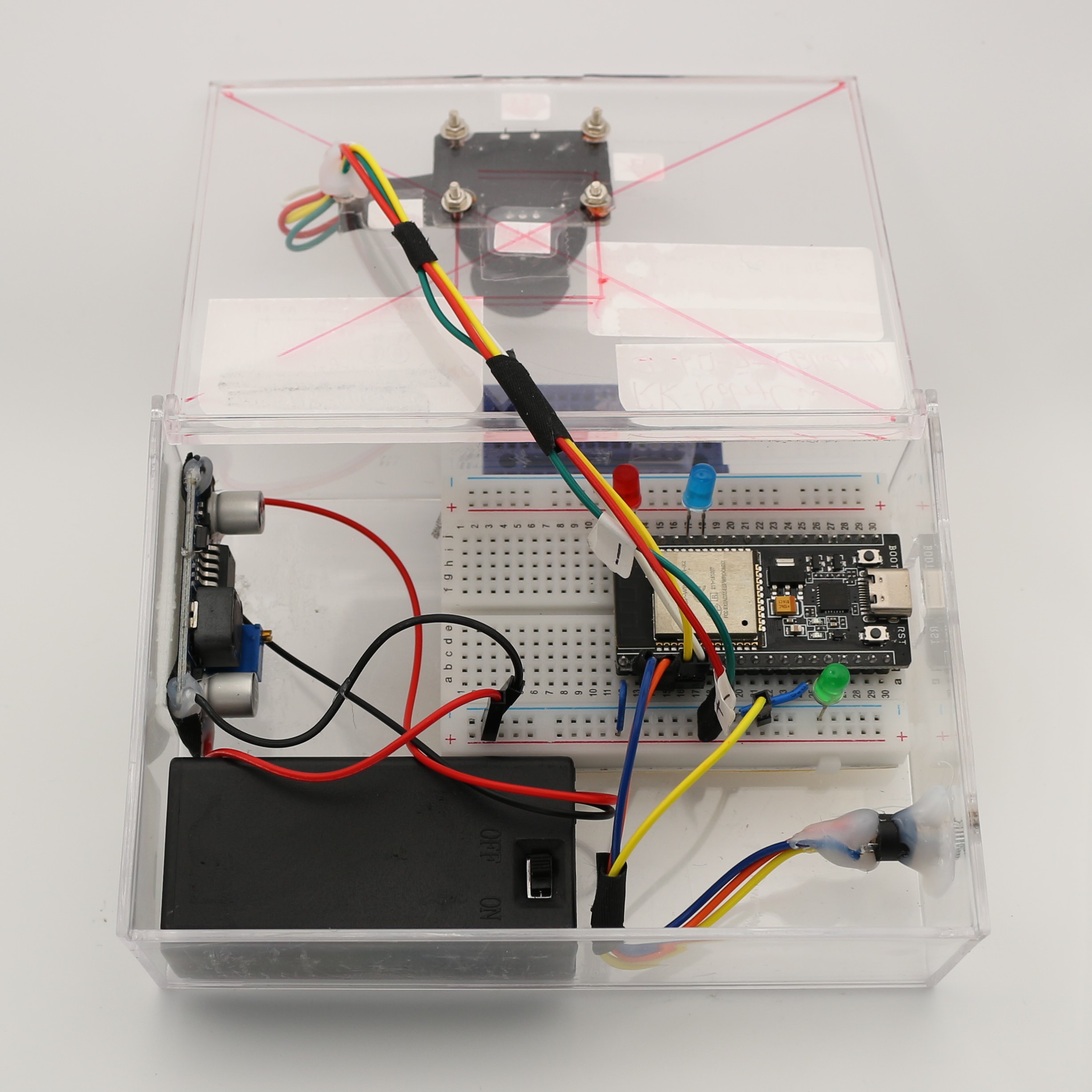
RobotCar1-WiFi-コントローラー
WiFiでコントロールするロボットカーのコントローラー。
コントローラーの内部。ESP32、DC-DCレギュレータ、9Vバッテリーケース、ジョイスティックがみえる。
コード (C++)