昆虫は,時々刻々と変化する環境から必要な情報を受容し,適切な行動をとることができる.昆虫のもつこの適応能力を機械やロボットの制御に応用することができれば,未知な環境や障害に強いシステムができるかもしれない.それでは,昆虫はどれほどの適応能力を持つのだろうか.ここでは,神経科学・行動学的知見に基づく脳モデルのみならず,昆虫脳,そして昆虫そのものを用いて機械やロボットを動かすことで,昆虫の適応能力を評価している.脳モデルを積んだロボットが,これら「生体-機械融合システム」と同等の能力を示したとき,我々は初めて脳を理解したと言えるであろう.
昆虫操縦型ロボット
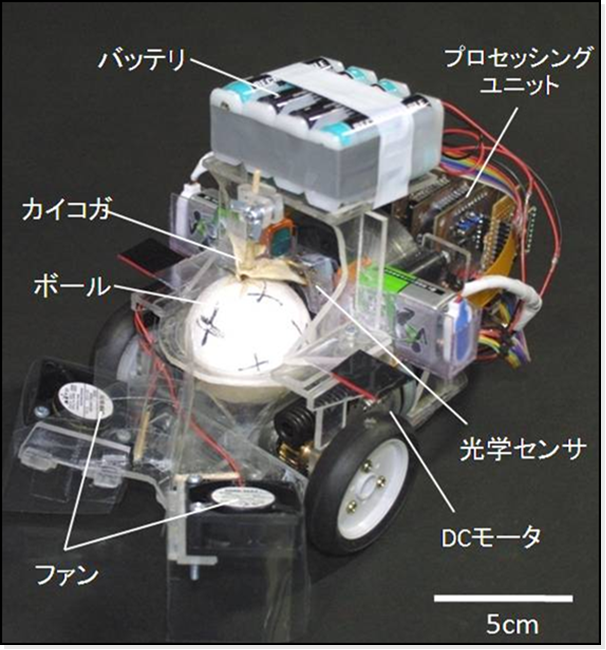
昆虫の適応能力を解明するために,昆虫自身がロボットを操縦する昆虫操縦型ロボットを開発した.ボール上のカイコガの歩行は、ロボットの運動に変換される.この変換ルールを変化させても,カイコガは正しく認識して目的地を目指すことが示された.
昆虫脳操縦型ロボット
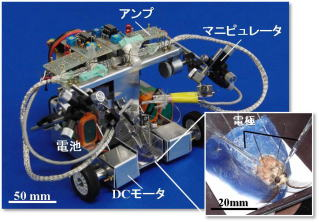
適応行動をとる昆虫の脳内部の情報処理機能を理解するために,昆虫脳操縦型ロボットを構築した.
脳をロボットのコントローラとしたこのシステムを用いることにより,環境中で適応行動をとるときの脳の機能を評価することが出来る.
匂い源探索ドローン
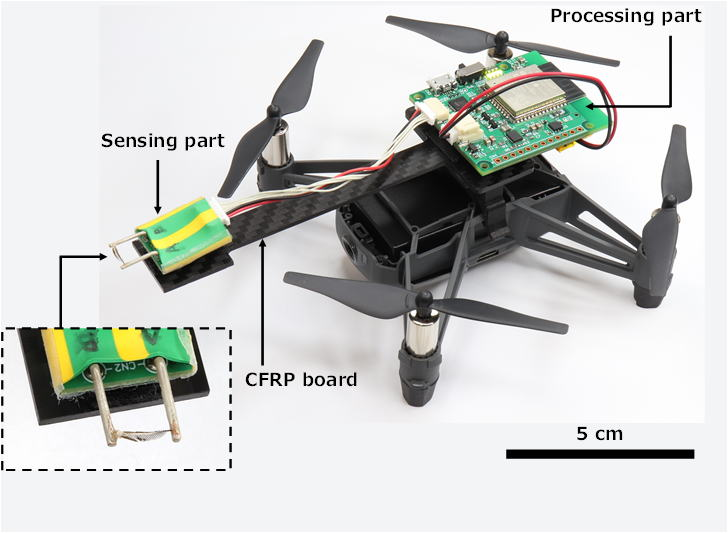
カイコガの触角を匂いセンサとした匂い源探索ドローン。フェロモンに対する触角ので電気的応答(触角電図)によりドローンの飛行が制御される。ドローン上で触角電図が計測できることが示され、匂い源探索の実現可能性が示された。
昆虫規範衝突回避モデル
昆虫の素早い衝突回避行動を機械へ応用するために,マルハナバチの行動解析を行っている.ハチの目の前に置かれたスクリーンに物体が接近する映像を表示すると,ハチは避けようと運動を変化させる.この行動変化の解析結果から,行動モデルを作成し,移動ロボットに搭載してその性能の評価を行っている.

閉ループ系における昆虫の行動・感覚情報統合アルゴリズムの研究
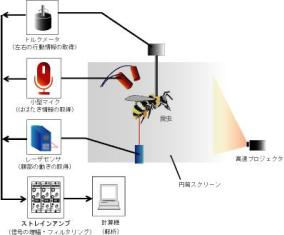
昆虫に与える視覚刺激・嗅覚刺激を任意に操作でき,その視覚刺激を昆虫の行動と関連づけた閉ループ実験系を構築し,行動実験でカイコガの定位行動を解析しました.また,定位行動の解析では,行動実験結果を基に,シミュレーションで嗅覚情報と視覚情報を統合した定位行動モデルを作成しました.嗅覚情報に応じて視覚情報処理を変化させることで,定位能力が向上することが示唆されました.