カイコガのオスはメスの出すフェロモンの匂いを触角で検出すると、メスを探す行動を起こします。ここでは、メスのフェロモンの匂いのかわりにアルコールを使い、触角のかわりにアルコールセンサーをつかって、匂い(アルコール)に反応して動くロボットカーを作ってみましょう。
動画:実際にアルコールをかけてみる1。
カイコガはフェロモンの匂いを検出すると、検出している間、直進し、匂いがなくなると、ジグザグそして回転という一連の行動パターンを示します。このパターンの途中で、再度匂いを検出すると、はじめから、直進・ジグザグ・そして回転歩行を繰り返して、匂い源であるメスを探索します。
ロボットカーはカイコガと同様に、アルコールを検出すると直進し、検出できなくなるとジグザグから回転に移ります。途中で、アルコールを検出すると、始めからこのパターンが繰り返され、直進ージグザグー回転を繰り返します。
アルコールはジャバラピペットで行っています。
動画:ロボットカーの説明(上の動画とは電池の位置が異なります)
アルコールセンサーは、ロボットの先端の左右に2つ設置しました。Arduino nanoで制御しています。センサが反応するとLEDが点灯します。左右のセンサの値は、4桁の7-segmentディスプレイで表示されます。左の2桁で左のセンサの値、右2桁で右センサの値が表示されます。ある値(ここでは40)を超えると、Arduino nanoから、ロボットカーのモーターが駆動され動きます。左右のセンサの感度の調整は各センサの後ろにある半固定抵抗で行います。
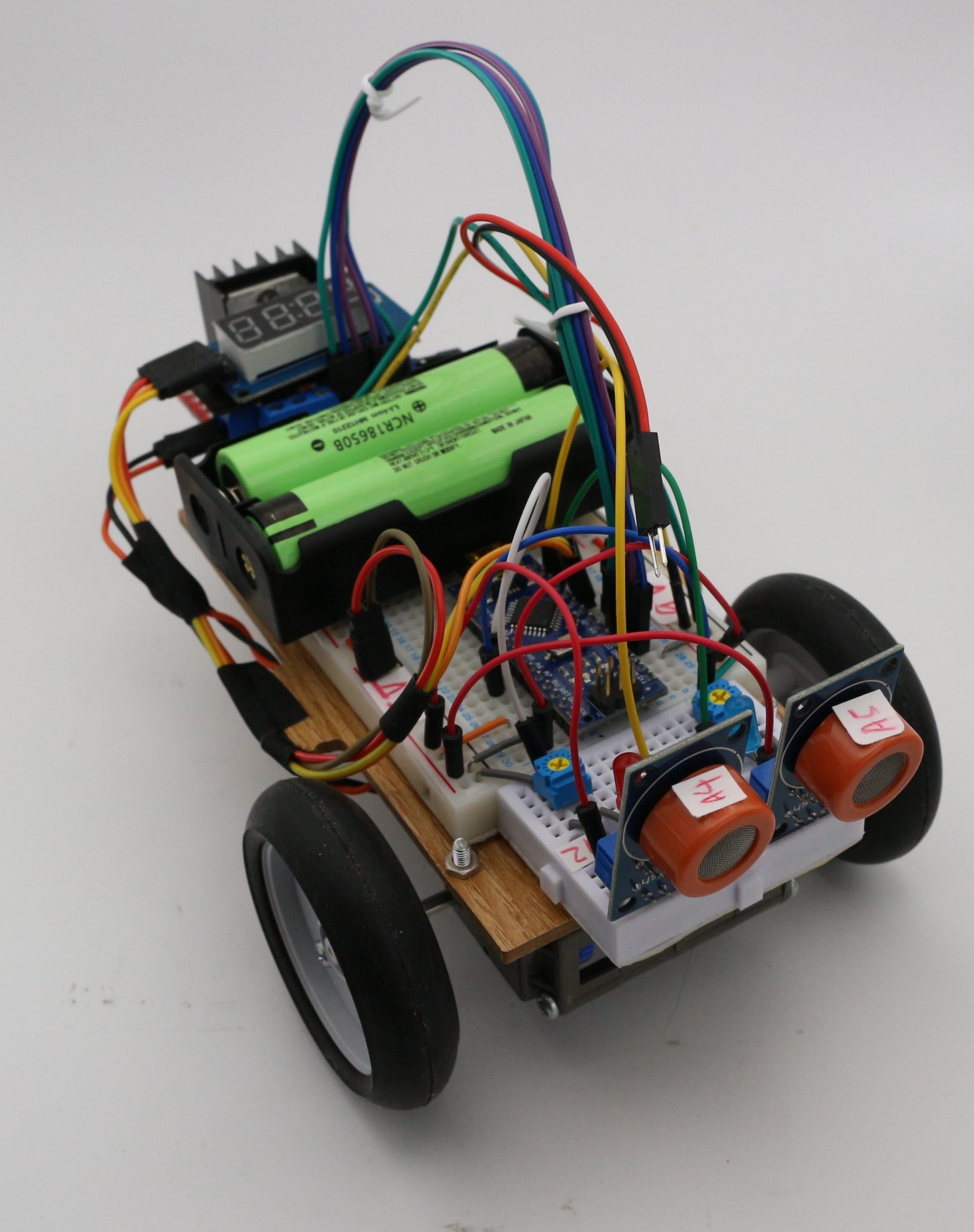
全体像。
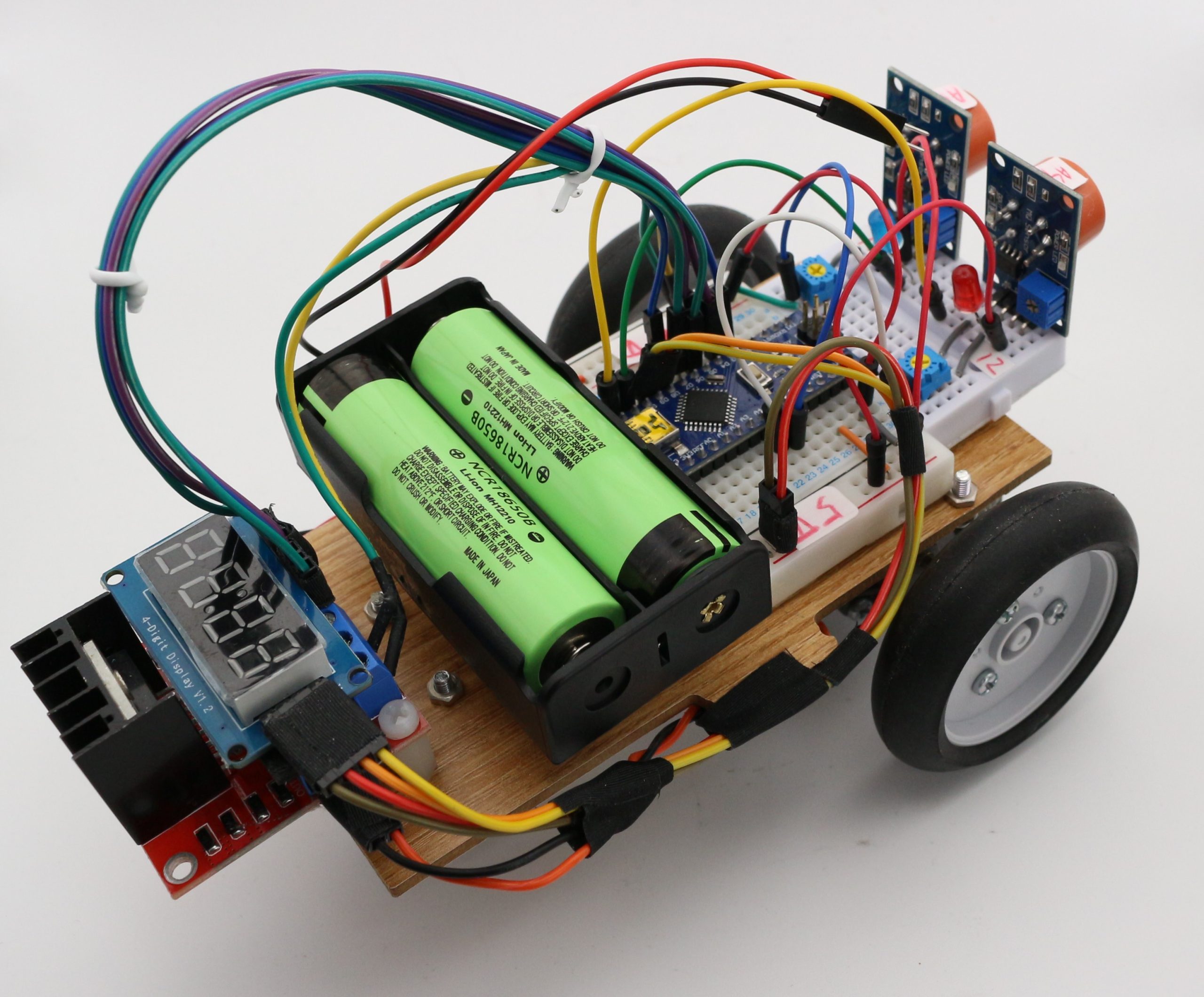
後方横から見たところ。