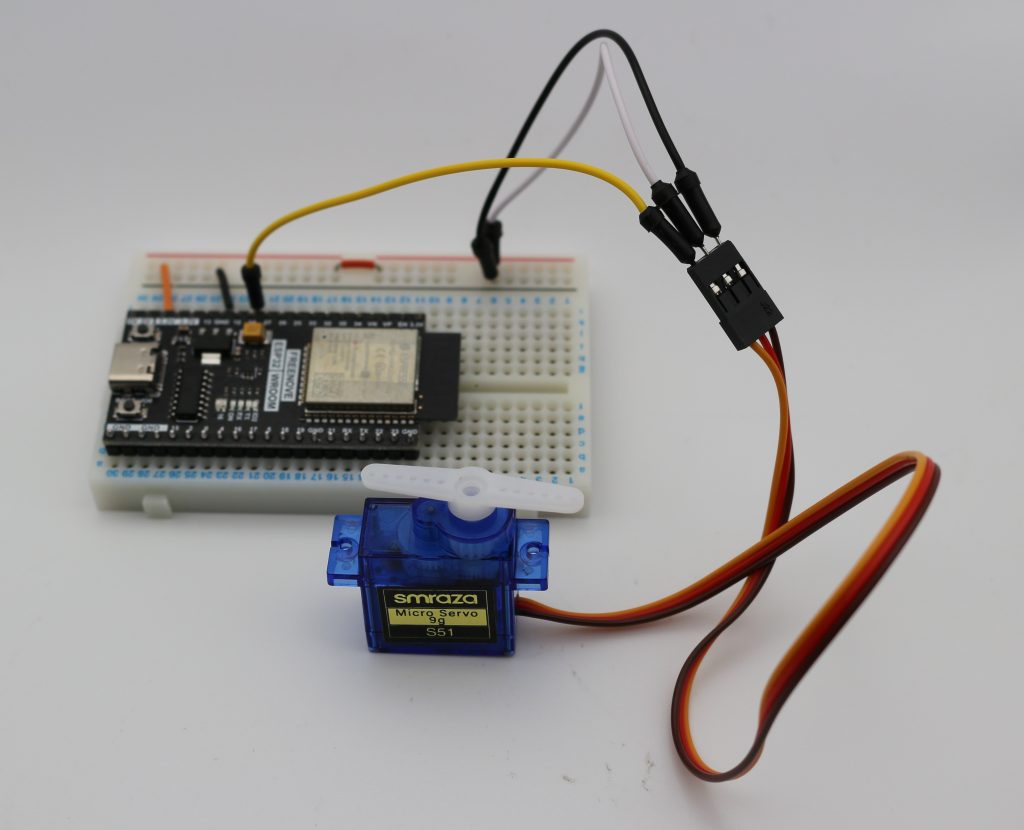

茶:GND
赤:3.3V
橙:信号(ここでは14番ピンに接続)
PictoBloxのオリジナルのC++コードは以下のようになるが、使用しているesp32PWMUtilities.hがライブラリから見つけられない。これに代わるライブラリとして、ESP32Servo.hが標準で用いられているので、それに片くすることで、あとは同じコードで動作します。
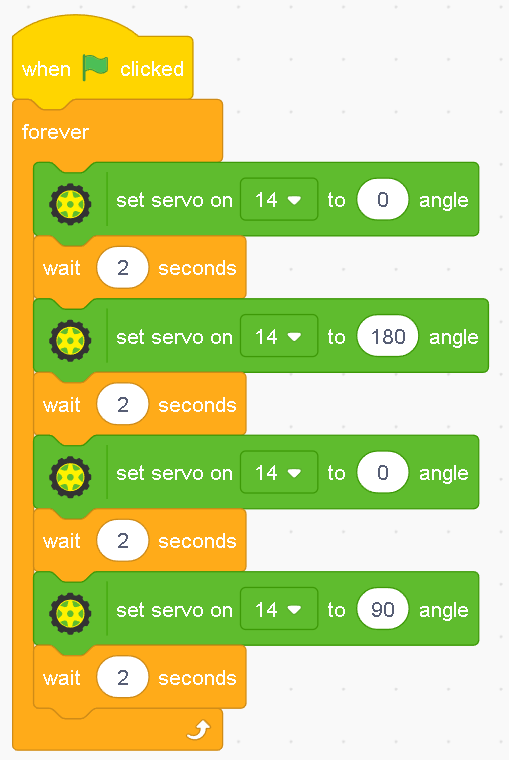
ここでは、まずはサーボモータのホームポジション(0度)へ、そして、180度回転してホームポジションへ、そして、90度回転しホームポジションへ、が繰り返されます。
//This c++ code is generated by PictoBlox
//Included Libraries
#include <esp32PWMUtilities.h>
//MACROS are defined here
Servo Servo14;
void setup() {
//put your setup code here, to run once:
Servo14.attach(14);
}
void loop() {
//put your main code here, to run repeatedly:
Servo14.write(0);
delay(2 * 1000);
Servo14.write(180);
delay(2 * 1000);
Servo14.write(0);
delay(2 * 1000);
Servo14.write(90);
delay(2 * 1000);
}
----------------------------------------------------------------------
変更したコード
----------------------------------------------------------------------
//This c++ code is generated by PictoBlox
//Included Libraries
//#include <esp32PWMUtilities.h>
#include <ESP32Servo.h> //注意:このライブラリに変更
//MACROS are defined here
Servo Servo14;
void setup() {
//put your setup code here, to run once:
Servo14.attach(14);
}
void loop() {
//put your main code here, to run repeatedly:
Servo14.write(0);
delay(2 * 1000);
Servo14.write(180);
delay(2 * 1000);
Servo14.write(0);
delay(2 * 1000);
Servo14.write(90);
delay(2 * 1000);
}