| 研究紹介 |
昆虫が獲得した感覚・脳・行動の機能や機構の解明は生物学的に重要なだけではなく、工学設計においても重要な手本となる。なかでも昆虫がもつ匂い検出とその発生源の探索能力は群を抜くが、工学的には未だ実現できない技術である。昆虫の嗅覚による適応能力を評価し、その神経機構を解明するための新しいアプローチである「昆虫-ロボット融合システム(サイボーグ昆虫)」の研究や、昆虫脳をスーパーコンピュータ「京」や「富岳」に再現することで理解し、活用する研究を進めている。また、,遺伝子工学技術により昆虫の優れた生体機能を活用した匂いセンサや、昆虫自体をインテリジェントなセンサ(センサ昆虫)とする研究を進める。昆虫科学により自然と調和し共存するための新しい科学と技術の世界の開拓を目指している。
|
生体-機械融合
システム
環境適応の理解と応用 |
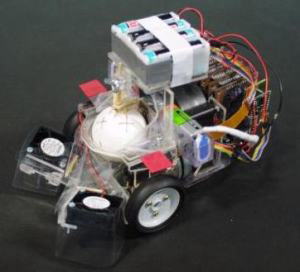
昆虫操縦型ロボット
カイコガが歩行することで回転するボールの動きを検出し、カイコガと同じように動くようにロボットを操作した。日本科学未来館で常設展示。
|
昆虫脳操縦型ロボット
カイコガの匂い源探索を指令する神経信号により動作する移動ロボット。ロボットはカイコガの身体となるため、「サイボーグ昆虫」ともいわれる。
|

昆虫脳をモデルとした匂い源探索ロボット
このロボットには、匂いセンサとしてイオンセンサを搭載した。匂い源探索のアルゴリズムを検証するためのロボット。
|
昆虫制御
空間デザイン
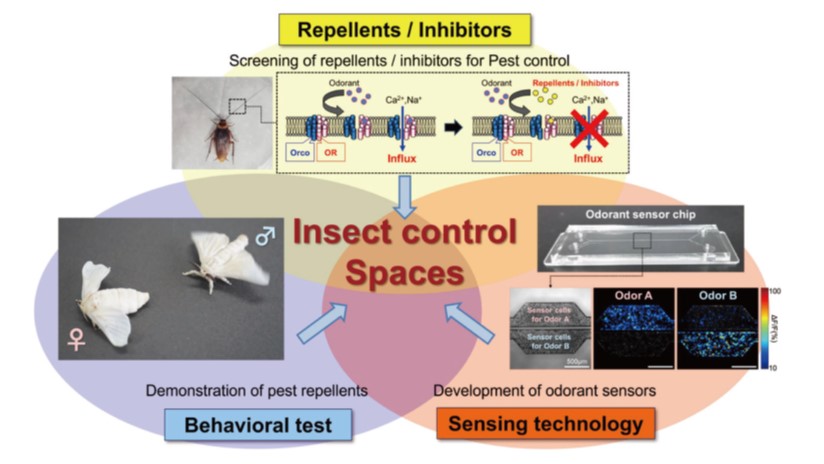
昆虫の嗅覚受容体を遺伝子工学的に活用した超高感度匂いセンサの開発 |
ダイキン工業との共同研究
昆虫の嗅覚受容体を活用することで、特定の匂いを超高感度で検出する匂いセンサの開発が可能となる。
|
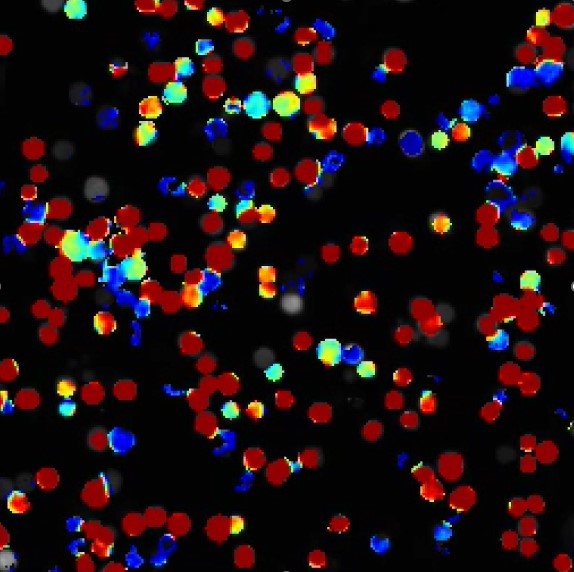
センサ細胞
昆虫の培養細胞に特定の匂いに反応する昆虫嗅覚受容体を発現させた匂いセンサ(センサ細胞)。特定の匂いに反応して蛍光強度が変化する。蛍光強度の変化を色の変化として表示した。
|

センサ昆虫(警察昆虫)
カイコガの触角にあるフェロモン受容細胞に特定の匂いに応答する嗅覚受容体を発現させた「センサ昆虫」。カイコガは特定の匂いをフェロモンと感じて、その匂いを探索する。
|
昆虫神経生理学
昆虫の脳を仕組みの解明を目指す |
匂い源探索を指令する
神経細胞
カイコガを用いて感覚・脳・行動のしくみを単一のニューロンから解明する。
|
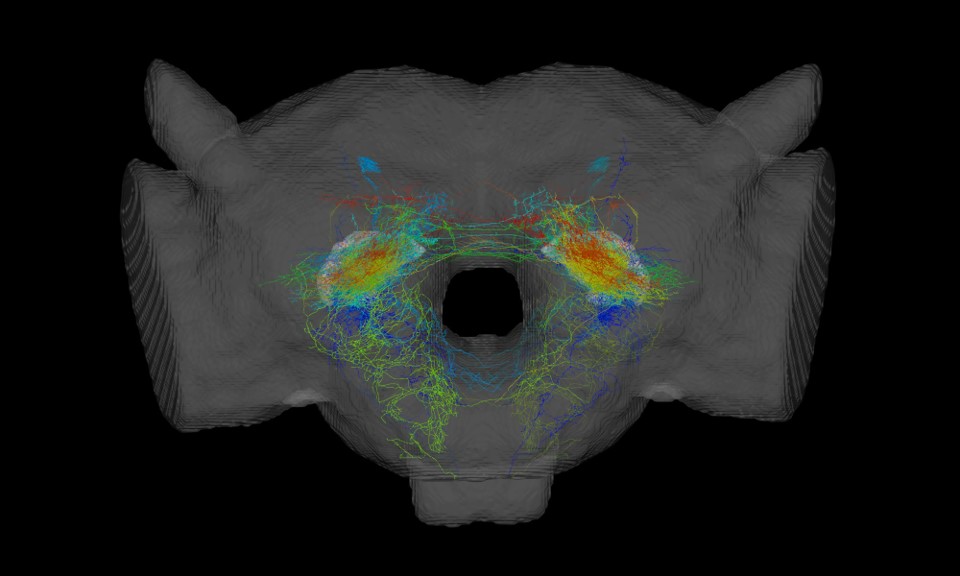
昆虫の匂いを識別する
脳領域(触角葉)の活動
昆虫の匂い識別機構の解明。触角葉における糸球体の匂い刺激に対する時間空間応答のイメージ化。
|
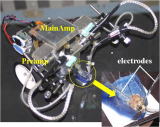
昆虫の脳にある神経細胞に電極を刺入する様子
昆虫脳を構成する神経細胞の網羅的研究。可視下で特定の神経細胞に電極を刺入し神経細胞の形を調べる。
|
昆虫全脳
シミュレーション
次世代スパコンによる脳のモデル化とシミュレーション。昆虫の性フェロモン識別機構の解明とバイオセンサの開発 |
昆虫の脳ニューロン
昆虫脳の単一ニューロンの構造。非常に複雑な形態であり、その形も重要な意味をもつ。 |
ニューロンデータベース
カイコガの脳を構成するニューロンの世界最大級のデータベース。このデータを使って、リアリスティックな昆虫脳の再構築をおこなう。 |
神経回路シミュレーション
カイコガのフェロモン源探索行動の定型的パターンを形成する前運動中枢の神経回路のシミュレーション。
|
脳を創り、理解し、活用する研究
21世紀の最も重要な研究テーマとして、脳のしくみを知ることが挙げられます。私たちの研究室では、脳の構造と機能を生物学的に分析し、その結果を工学的に再構成することによって、脳を理解したいと考えています。しかし、人間の脳は、それを構成する素子である神経細胞が1000億個もあり、その一つ一つを
解析することは非常に困難です。そこで、神経細胞数が10万個程度と少ない昆虫の脳を中心に、無脊椎動物のシンプルな神経系をモデル脳として研究を進めています。これらの動物は神経系こそ小さなものではありますが、私たち人間に匹敵する能力を持っています。走る・泳ぐ・飛ぶといった運動能力のほかにも、記憶・学習や、ミツバチのように高度な社会性を持つものも少なくありません。また、昆虫の匂いをかぎわけるしくみは、私たち哺乳類と同じであることが分かってきました。また、軟体動物のアメフラシも記憶・学習による神経回路の変化が初めて明
らかにされ、神経回路研究のモデルとして広く用いられています。
私たちは、カイコガの匂い源探索行動を中心に、神経回路を構成する個々の神経細胞から実際の行動までを分子遺伝学,神経生理学,光生理学(イメージング),行動学,さらにロボティクスなど様々な手法を用いて研究しています。神経細胞の活動をとらえるために、先端直径0.1μmの細いガラス管微小電極を神経細胞へ刺入することで活動電位を記録する細胞内記録法、複数の神経細胞の活動を同時に捉える光学計測法などを用いています。このような神経細胞の情報は理化学研究所との共同研究によってデータベース化が進められています.実際の行動を捉えるためには、昆虫の運動を自動的に追跡するトレッドミルやサーボスフィア、高速度カメラを用いています。その他にも、超小型軽量テレメトリといった新しい実験方法の開発にも取り組んでいます。また,遺伝子操作技術によって,特定の神経細胞を蛍光タンパクでマーキングしたり,神経細胞の活動によって蛍光強度が変化するタンパクを発現させることで,神経活動を計測しています.さらには,昆虫の脳が生成する行動指令信号によって移動ロボット(ロボット化した身体)を制御する,昆虫のサイボーグ化にも世界で初めて成功を収めています.
これまでの研究により、一見複雑なカイコガの匂い源探索行動が、プログラム化されたパターンから構成されていること、そしてそれらの行動を司る神経回路が神経細胞のレベルから明らかになってきました.私たちはさらに、これらの神経回路を精密にモデル化し,次世代のスーパーコンピュータによりシミュレーションすることで,昆虫の脳内の神経回路は,匂いの情報を受け取り,実際にどのように機能しているかを視覚化し,推定することがはじめてできるようになってきたのです.そしてこの神経回路モデルでロボットを制御し,カイコガの匂い源探索行動と比較するのです.このような生物学と工学,情報学の境界領域に立脚した研究手法と数多くの成果は、世界的にきわめて高い評価を得て
きました。
さらに、私たちは、昆虫脳を脳研究の「モデル」として考えるだけではありません。3億年以上も前の石炭紀の化石に見られるように、幾多の環境変動にもかかわらず、昆虫はその姿をほとんど変えることなく今日に至っています。これは、昆虫が非常に環境適応性に優れた設計をしているためであり、ロボット工学の面でも非常に注目されています.私たちは、昆虫をロボットに組み込み、神経系から指令される行動指令信号を検出してロボットを駆動する、生体-機械融合システム(昆虫サイボーグ)の製作を目指しています。これを様々な環境で動作させることで、刻々と変化する環境に対応した神経系の活動をリアルタイムで観察することができ、昆虫の環境適応性に優れた設計を学ぶことができると考えています。このようや取り組むは,日産自動車との共同研究による,昆虫の視覚機能を活用した「障害物回避ロボット」にも生かされています
|
■ 論文リスト
■ 共同研究
■ 研究プロジェクト
|
