 |
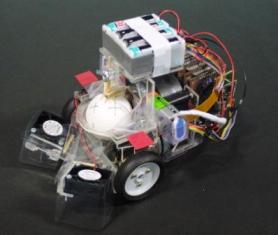
The insect-controlled robot An insect-controlled robot, integrating an insect and a robot, was developed to investigate the capability of insects to adapt to perturbations. A silkmoth controls the robot by walking on the ball. Perturbations can be induced by manipulating the transmission between the silkmoth movements and robot movements. The silkmoth can control the robot normally even in the presence of perturbations. |
 |
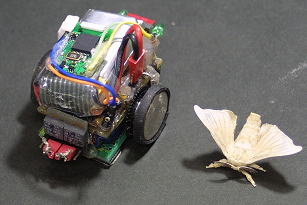
The insect-brain-controlled robot |
 |
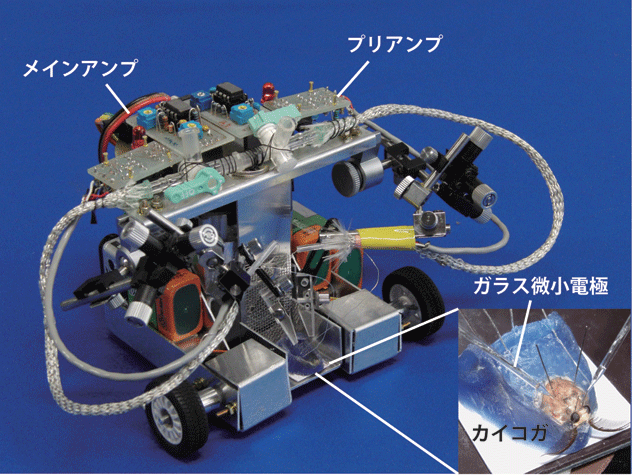
The odor-seeking robot based on an insect |
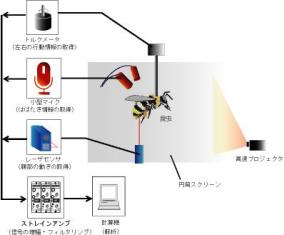 |
Collision-avoidance system based on an insect The insect's processing of visual information and following behavior are fast, simple and robust, which could be applicable for engineering. To establish an behavioral model of insect's collision avoidance system, we are analyzing bumblebee's behavior: changes of yaw torque and wingbeat frequency in response to looming stimuli. Based on the behavioral analysis, we make a model and evaluate it using a mobile robot. |